Projects
Research Projects at JHU
LLM-Aided End-User Robot Programming
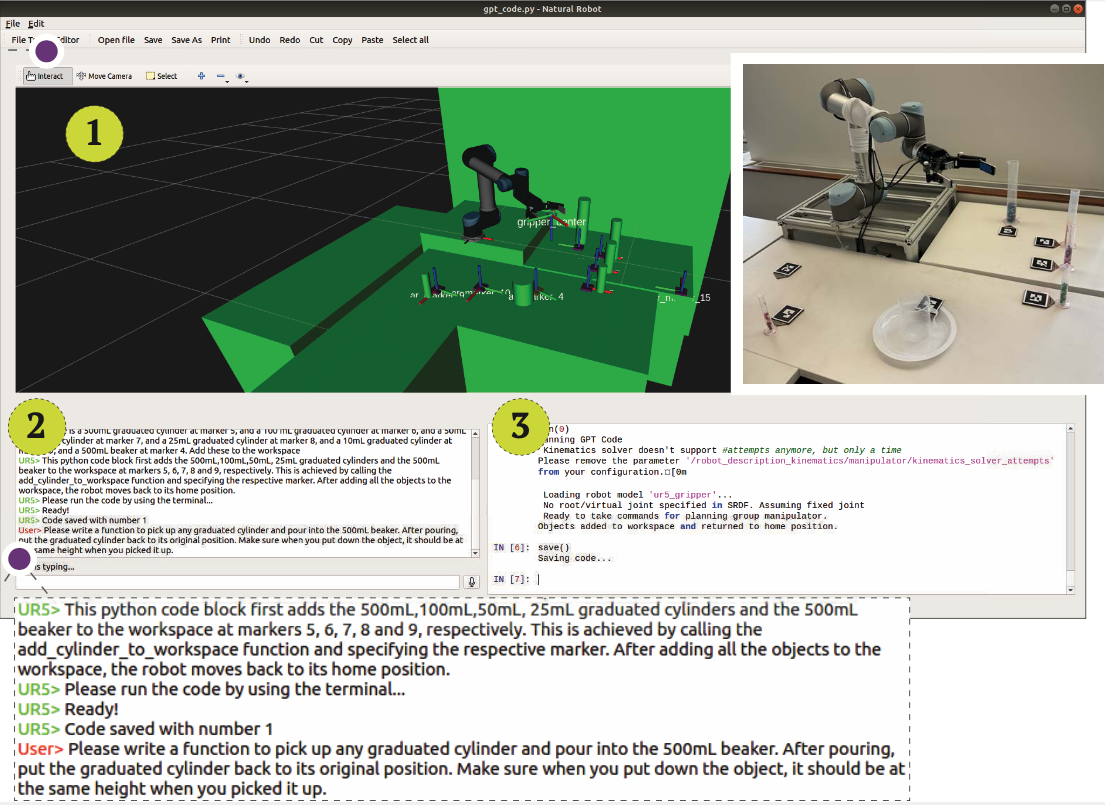
ROS | MoveIt! | LLM | PyQT
We introduce a novel integrated development system, Alchemist, that leverages LLMs to empower end-users in creating, testing, and running robot programs using natural language inputs, aiming to reduce the required knowledge for developing robot applications.
Research Projects at NTU
Collaborative Tea-Harvesting Robot

ROS | Simulink | C++ | SLAM | Motion planning
In this project, we developed an intelligent vehicle which can carry the tea harvesting tool and walk side-by-side with a farmer to pluck the tea collaboratively.
In addition to the collaborative features, object avoidance and path planning had been implemented to perform autonomous turning between rows of tea trees.
3D Printed Robotic Arm
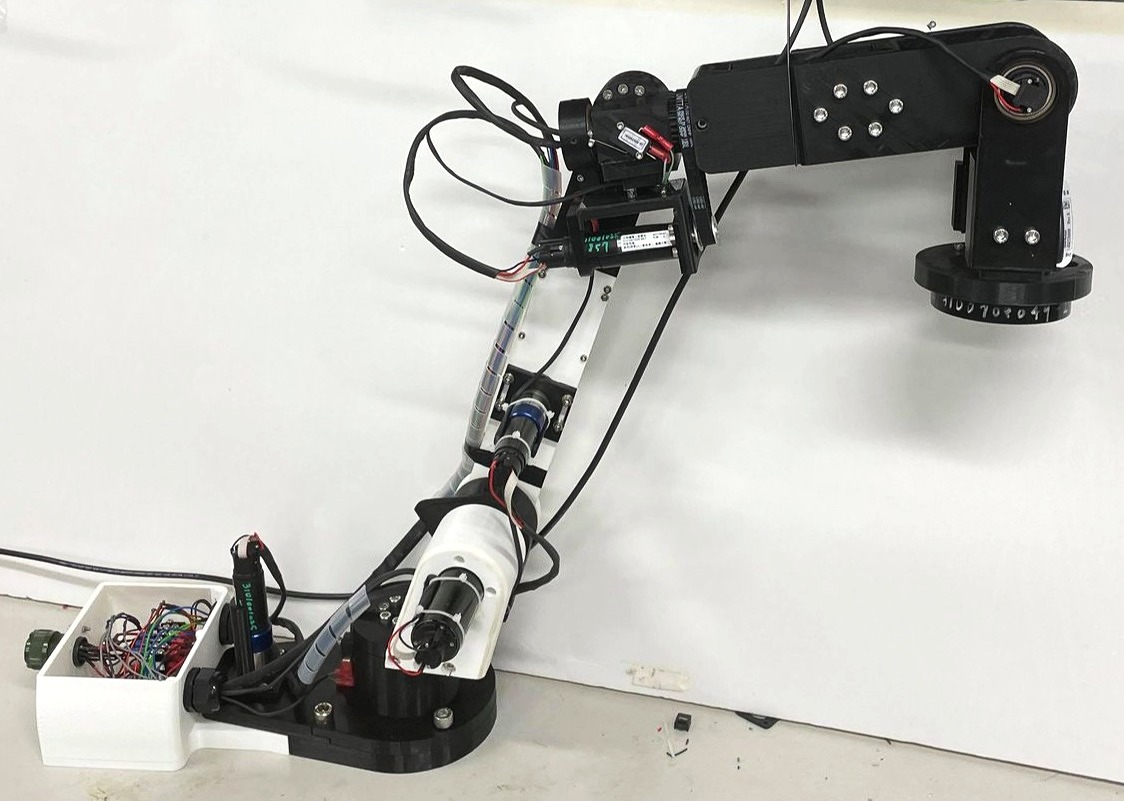
3D printing | Solidworks | Mechanism design
This project aims to develop an intelligent sensing and precise cultivating system for tomato growth in greenhouses by integrating Chlorophyll Fluorescence Imaging with a robotic arm. I designed and 3d printed a 5 DoF robotic arm and use it for visual-servoing to accomplish this.